New algorithm helps make portable CT machine images clearer
Mathematics: Undergraduate college students studied at the Emory REU a new, better way of improving image resolution with mathematical methods.
This blog post was written by Mai Phuong Pham Huynh, Manuel Santana, and Ana Castillo and published with minor edits. The team was advised by Dr. James Nagy. In addition to this post, the team has also given a midterm presentation , created a poster, made a poster blitz video, published code, written a paper, and developed a lesson plan.
{kind=link}
Research done at the 2021 REU/RET summer program at Emory University has devised a way to make medical diagnoses more effectively. The work behind this new algorithm relies heavily upon mathematical techniques that connect numerical linear algebra with optimization methods.
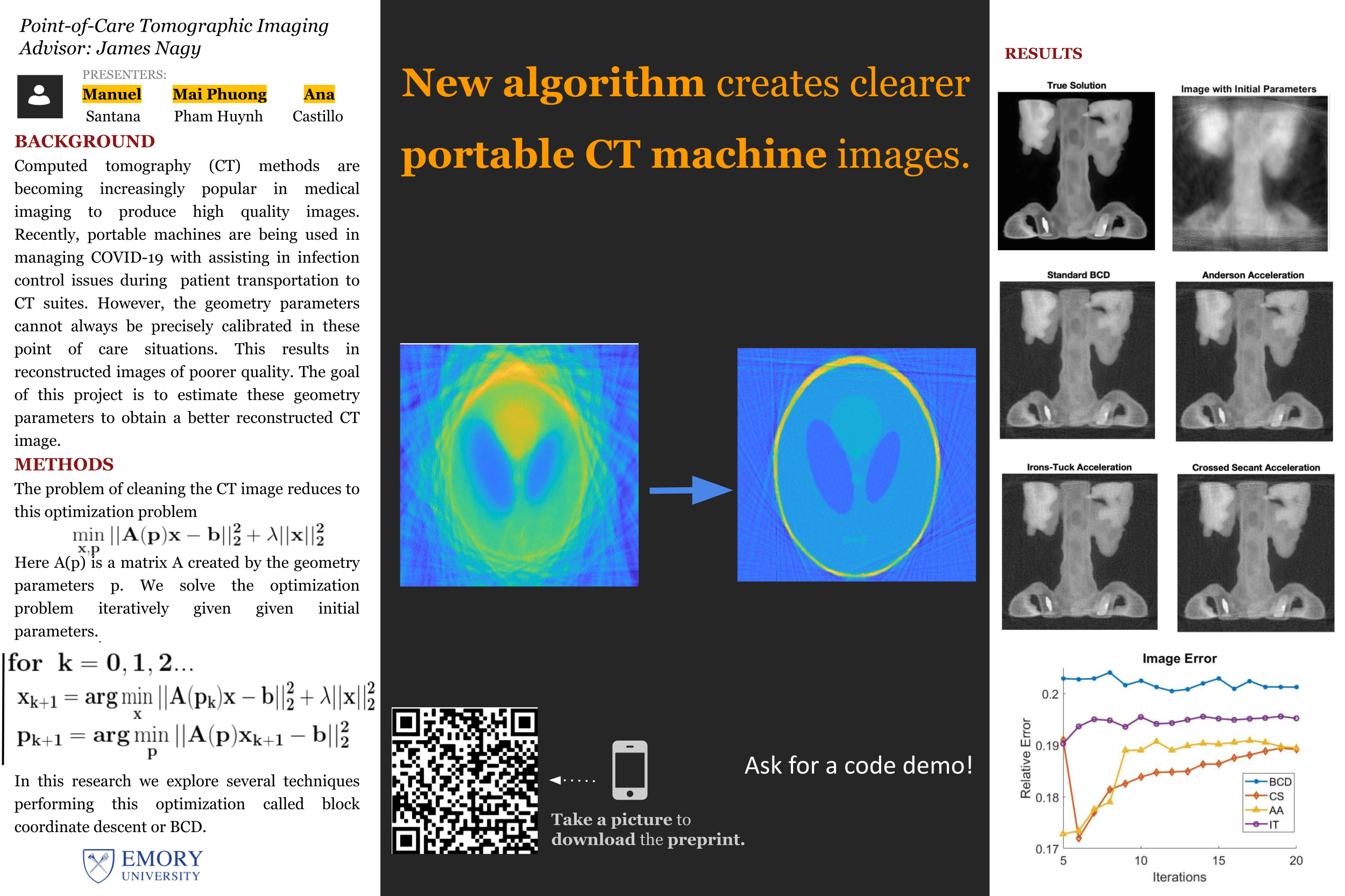
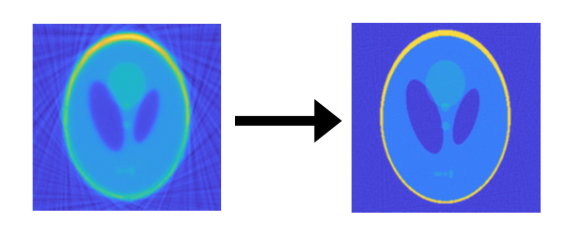
Some of the most important aspects of this work link branches of mathematics like calculus, statistics, algebra and geometry. The different contributions by mathematicians to these branches of mathematics were complementary and accelerated research in the area of image reconstruction. The results obtained from their work have offered other student mathematicians a different way to study these problems and shown that this is an effective way for radiology doctors to accurately diagnose illnesses and keep saving patients’ lives. The goal of the Point-of-Care Tomographic Imaging research group is to develop numerical methods that would estimate the geometry parameters of a portable CT scanning device and to reconstruct the image. CT images in portable devices are a lot clearer. This work has been one of the most interesting pieces of work ever accomplished.
COVID-19 and Imaging
The mathematical ideas involved in the Point-of-Care Tomographic Imaging project are of great importance. With these mathematical methods, imaging becomes a possibility with patients in all parts of the world, allowing them to live a healthy and happy life. To get better reconstructed images, the group considers a regularized linear least squares problem, to which the solution is approximated by using an alternating descent scheme known as block coordinate descent or (BCD). Each iteration of BCD has two steps. One BCD step solves a linear least square problem, and the next step solves the nonlinear problem.
 "Coronavirus" by Yu. Samoilov is licensed under CC BY 2.0
"Coronavirus" by Yu. Samoilov is licensed under CC BY 2.0![]()
![]()
By the 1900’s mathematicians had already found ways to use these iterative reconstruction techniques to reconstitute an image. In 1917, Johann Radon introduced the Radon Transform, followed by Stefan Kaczmarz in 1937. Scientists Allan McLeod Cormack and Godfrey Newbold Hounsfield developed the first scanning device. These innovations each contributed to modern medical scanning technology.
The medical field has greatly depended on these iterative reconstruction methods. In medical imaging, computed tomography (CT) techniques are becoming more and more popular for their ability to produce high quality images of the human body. CT methods use a combination of computer processes and mathematics to reconstruct images. The COVID-19 pandemic brought many challenges and setbacks to many doctors around the world and imaging played a vital role in helping diagnose the virus. Doctors have been able to use CT scans to diagnose and treat COVID-19 by examining the lungs of patients who are potentially infectious, or in recovery.
Point-of-Care Tomographic Imaging
Since the first CT scanner was developed, CT scanning technology has evolved significantly. Now, there are portable CT scanners that can be transported anywhere without trouble. The idea of transporting huge heavy CT scanners to remote locations was always a difficult task for many doctors. Point-of-care tomographic imaging has allowed radiologists to add portable CT scanners to their departments to increase patient satisfaction and improve medical outcomes. Portable CT scanners can be used to do scans of a patient without moving the patient out of bed.
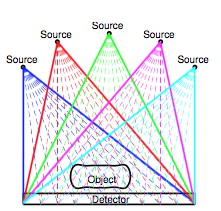
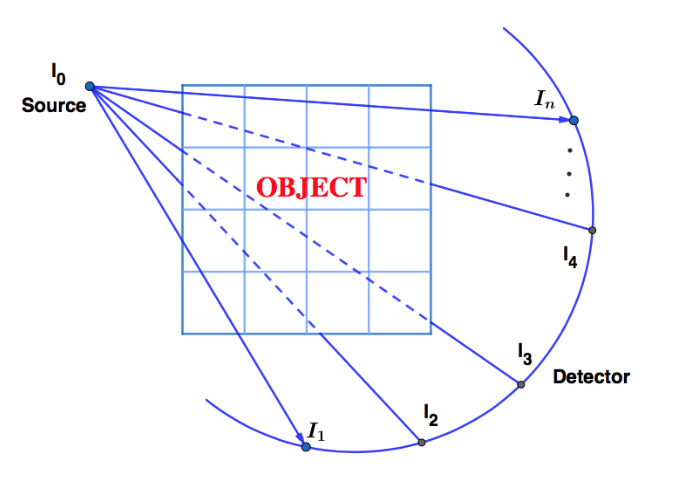
A CT scanner is a device that is composed of a scanning gantry, x-ray generator, computer system, console panel and a physician’s viewing console. The scanning gantry is the part that will produce and detect x-rays. In a typical CT scan, a patient lays on a bed that moves through the gantry. An X-ray source rotates around the patient and shoots X-ray beams through the human body at different angles. These X-ray measurements are then processed on a computer using mathematical algorithms to create tomographic (cross-sectional) images of the tissues inside the body.
Limitations arise when using these portable CT scanners for medical procedures since these devices require extensive care, such as regular calibration for effective performance. This is where the point-of-care tomographic imaging problem begins.
The Beginning of the Problem
Two parameters that relate to the geometry of portable CT scanning devices are:
- R - distance between source and detector and
- θ - orientation of source to detector.
During the CT acquisition process, the x-ray source rotates around the patient. Each time the x-ray source moves to a new position, these parameters change. In point-of-care imaging, these parameters are essential during the data imaging process. Imprecise data (unknown parameters) result in the reconstruction of poor quality images, while precise data (known parameters) yield a well reconstructed image.
How were these geometry parameters estimated to obtain better reconstructed images?
The group considered solving a regularized linear least squares problem. The solution to this problem is approximated by using an alternating descent scheme known as block coordinate descent or (BCD). They used this alternating algorithm in which each iteration alternately solves a linear last squares problem (for the image) and a nonlinear least squares problem (for the geometry parameters). An alternate form of this algorithm was also studied as a fixed point iteration, with acceleration techniques used to improve convergence. Implementation and numerical examples were done using MATLAB to obtain results. To understand the background behind this problem, the connection between Beer’s Law and linear algebra needs to be studied.
Beer’s Law & Linear Algebra
The Beer-Lambert Law or Beer’s Law was first developed in 1729 by Pierre Bouguer, and in 1852, Beer added to the law. Beer’s law states that as an x-ray source emits an x-ray beam and it passes through an object, the beam loses energy exponentially. To create a 2-D image, an imaginary grid of pixels is placed atop the object, and an x-ray beam is then shot through the object. Beer’s Law is used to create a system of linear equations.
From Algebra, it is known that a system of equations has three types of solutions, infinitely many, exactly one, or no solution. When there is no solution, the system is called inconsistent, as opposed to consistent when there exists a solution. When there are more equations (x-rays) than unknowns (pixels), then the system is overdetermined. This is what happens in computed tomography. When there are more unknowns (pixels) than equations (x-rays), then the system is underdetermined. In each equation, every unknown represents a physical property, called attenuation, for each pixel value. Pixels that have the same amount of material have the same attenuation. An image is then created from the pixels. The images obtained based on the attenuation values allow doctors to make more accurate diagnoses. For example, bones have a different attenuation than lungs.
A system of linear equations can be solved in Precalculus by the Gauss-Jordan elimination method. In linear algebra, a matrix equation of the form Ax=b is solved to find x. Ideally, this can easily be done. Unfortunately, for this project, this might not be possible for several reasons: 1) b has noise in it, and 2) the exact matrix A may not be known because the parameters R and θ may be perturbed (for example, the CT machine may not be calibrated correctly). Matrix A may also be a huge matrix containing millions of rows and columns. Typical approaches learned in Pre-Calculus or a linear algebra class cannot be used to solve this problem. The tomographic imaging research group uses other methods to solve these large problems, referred to as ill-posed.
An ill-posed problem is often referred to as one that is not well-posed. In the 20th Century, French mathematician Jacques Hadamard defined a well-posed problem as one having three properties: 1) a solution exists, 2) the solution is unique, 3) the solution depends continously on initial values. An ill-posed problem needs to be approached differently, e.g. -regularization. Tikhonov regularization is a common form of regularization for ill-posed problems.
The Linear & NonLinear Least Squares Problem
Throughout the 1800s, mathematicians such as Legendre, Gauss, and Laplace contributed ideas to the method of least squares. For example, the method of least squares can be used to find the line that minimizes the sum of squared distances between teh line and the given data points. In computed tomography, a problem arises that involves least squares, a regularized linear least squares problem. This regularized linear least squares problem is composed of x, the image, A(p), a matrix that is constructed by the geometry parameters, R and θ, b, the measured data, and a parameter α, called the regularization parameter. The nonlinear least squares problem does not include the regularization parameter.
The solution to this problem is found by the block coordinate descent (BCD). The BCD algorithm is an optimization algorithm that solves this problem iteratively. BCD works by minimizing the parameters R and θ and x one at a time. The linear least squares problem is considered first. It takes the initial parameters R and θ, generate matrix A, to get x, the image. Here the parameters, R and θ are known and x is approximated. Then, the nonlinear least squares problem is considered. Once x is known, then x is used to approximate the parameters, R and θ. In this latter phase, x is known and the parameters R and θ are approximated. The pattern continues until a good image is produced.
Filter - Based Regularization
Since it is impossible to get data exactly from the detector due to numerous reasons, regularization is needed to lower the error the solution caused by noise in the data. Tikhonov regularization is one of the most common ways to handle these noise levels. The method is named after mathematician Andrey Tikhonov. Tikhonov worked in numerous topics and different fields of mathematics. His best contributions are in topology.
Singular value decomposition (SVD) plays an important role in understanding the basic idea behind Tikhonov Regularization. The singular values of the matrix A are significant. To achieve good reconstructed images with small error, it is necessary to have the balance of large and small singular values; the large singular values have good information about the solution, but the small singular values cause errors to blow up.
MATLAB Toolboxes & Implementation
MATLAB was used in the project, including the optimization, signal processing, and image processing toolboxes. The IR Tools, AIR Tools II, and Imfil packages were also used.
To simulate a problem, the IR tools package is used. IR tools also provide regularized linear least square solvers. Three of these linear least squares solvers are: 1) hybrid-LSQR algorithm, 2) IRN, 3) FISTA. To approximate the solution of the non-linear least squares problem two methods are used: 1)lsqnonlin, 2) imfil.
The implementation of BCD used the IR Tools package and naming conventions. In the base IRtools package, the function PRset is used to set up options for computed tomography problems, where PRset is updated to accept values related to the BCD (inital guess for parameters). To simulate a CT problem with unknown geometry parameters PRtomo_var is used with the image size being n×n. PRtomo_var generates all the data necessary to simulate the inverse problem. IRset updates to include parameters for BCD, such as which acceleration technique to use, and IRbcd implements the BCD algorithm.
The steps above permit the simulation and solving of a CT reconstruction experiment. With n=64 and perturbations added to the parameters R and θ, the test problem is generated. The image used is the Shepp-Logan image.
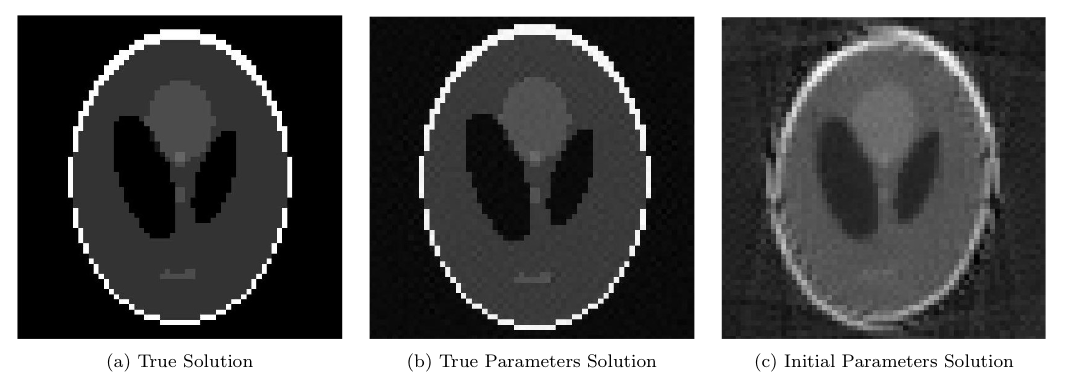
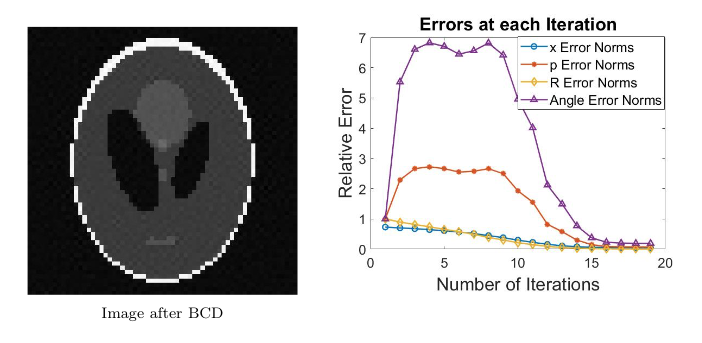
After solving the problem with the BCD algorithm, it can be seen that the solution with the BCD resembles that of the true parameters solution.
Acceleration Techniques: Tests & Results
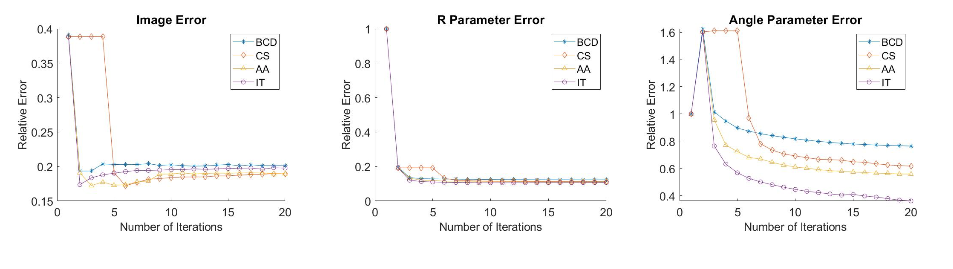
Other mathematicians continue their work in these fields. Some of them introduced ideas on acceleration techniques to speed up the convergence rate of fixed point iteration problems. One of them is Donald G. Anderson, famous for his work on the Anderson Acceleration, also called Anderson mixing. In the tomographic imaging project, estimation of the geometry parameters can be viewed as a fixed point iteration technique. The research group used three fixed point acceleration schemes in their numerical experiments: 1) Irons-Tuck method, 2) Crossed - second method, 3) Anderson Acceleration. All these acceleration tests were performed and seemed to improve image resolution.
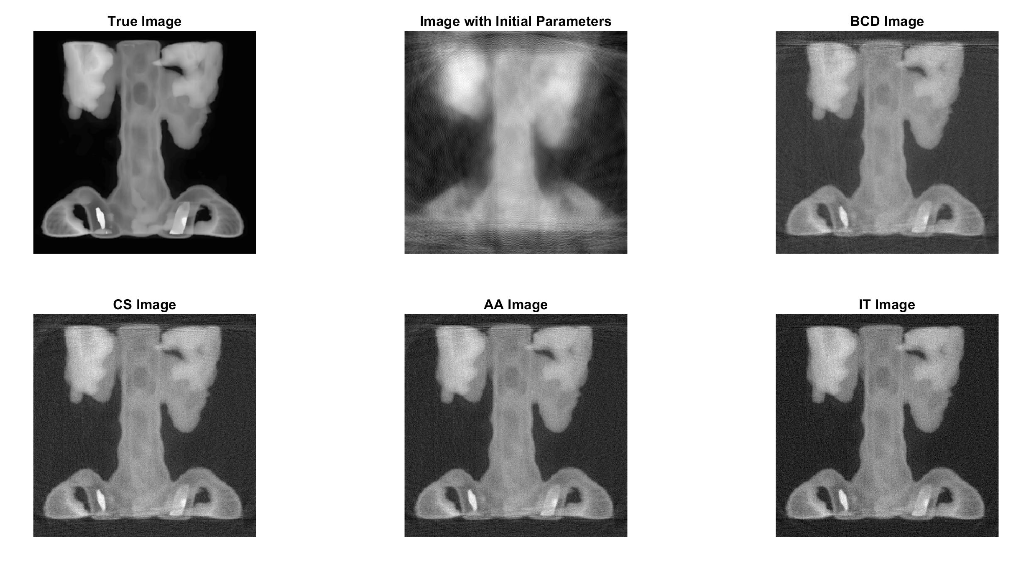
From tests performed, the acceleration techniques provided slightly better convergence, with the crossed secant method and Anderson Acceleration performing the best. The Irons-Tuck method converged much better in the angle parameters, but took much longer. The Irons-Tuck image seems to have the least background noise.
Poster Blitz Video
More About the Team
Mai Phuong Pham Huynh
Mai is a rising junior at Emory University, majoring in Applied Mathematics and Statistics. Her research focus is on numerical analysis and scientific computing. In her free time, she enjoys listening to violin concertos, doing giant Jigsaw puzzles, and searching for vintage vinyl records from the 50s-90s.
Manuel Santana
Manuel is a rising senior at Utah State University. His research interests are in all areas of computational and applied math. When not doing math he enjoys European handball, pickleball, raquetball, and cooking with his wife Emily.

Ana Castillo
Ana Castillo is in her 10th year teaching. She is certified to teach Spanish and Mathematics grades 6-12 in the states of Texas, Tennessee and Illinois. She is working for Proximity Learning, a company that has allowed her to teach virtually in different school districts in the United States. She has been a participant of the Park City Mathematics Institute Teacher Leadership Program (PCMI TLP) and part of a team that runs a Math Teachers’ Circle in the Rio Grande Valley Area. In her spare time, she enjoys taking long walks, listening to classical music (Vivaldi), spending time with her pets (dogs & donkeys), cooking, reading, writing and traveling.

James Nagy
Samuel Candler Dobbs Professor
My research interests include efficient training of deep neural networks and optimal representations of high-dimensional data.