Low-Precision Algorithms for Image Processing
This post was written by Xiaoyun Gong, Yizhou Chen, and Xiang Ji and published with minor edits. The team was advised by Dr. James Nagy. In addition to this post, the team has also created slides for a midterm presentation, a poster blitz video, code, and a paper.
In One Sentence:
Our group works on experimenting with iterative methods for solving inverse problems at different precision levels.
Background: Why Low Precision?
What is the most important aspect for an excellent gaming experience? A lot of people would answer real-time! Everyone wants their games to be fast, and it is always a bummer that the screen freezes during a critical combat. This is why we are investigating low precision arithmetic: to decrease the computation time and speed things up.
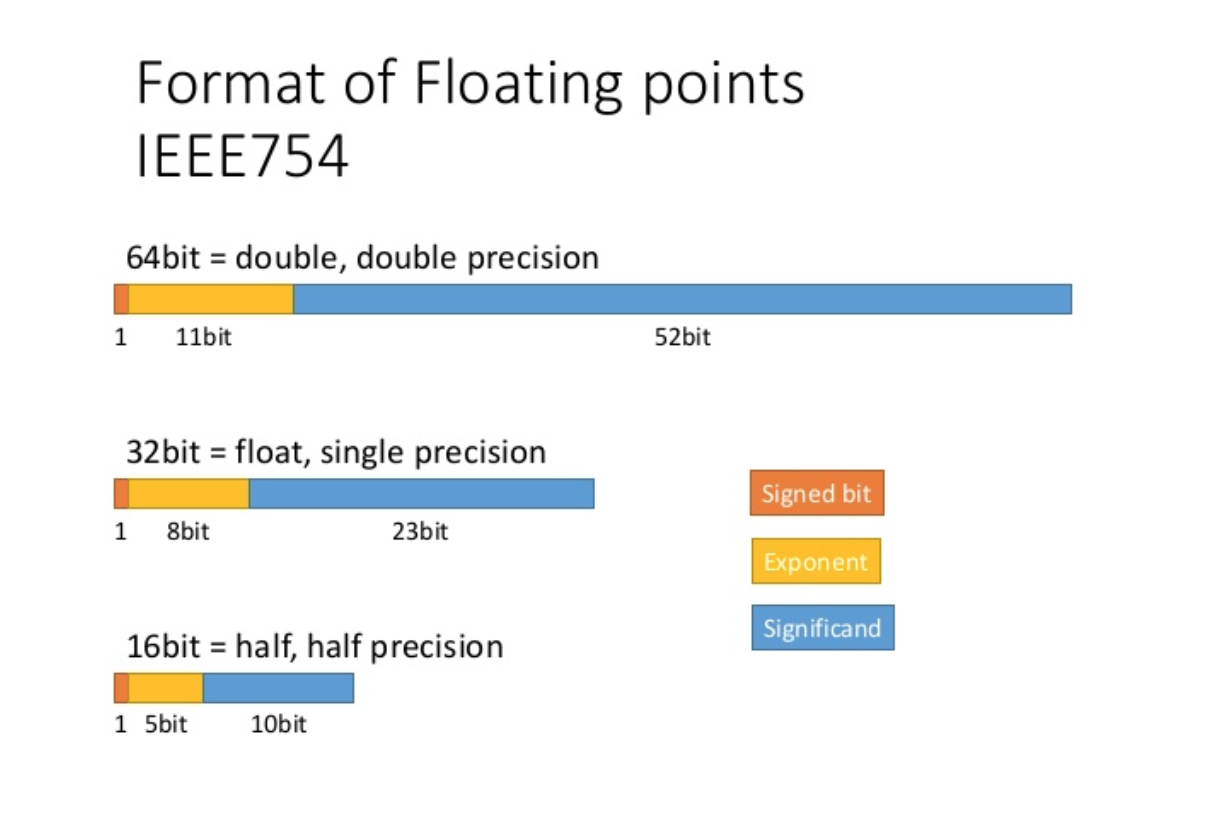
Nowadays, most computer systems operate on double precision (64-bit) arithmetic. However, if we decrease the number of bits for each number to 16 bits or even lower, the processing time can be much significantly reduced, although the benefit comes at the cost of a loss of accuracy.
Using tensor cores for mixed-precision scientific computing. Oct-2021. url: https://developer.nvidia.com/blog/tensor-cores-mixed-precision-scientific-computing/
Simulating Low Precision
Matlab function chop
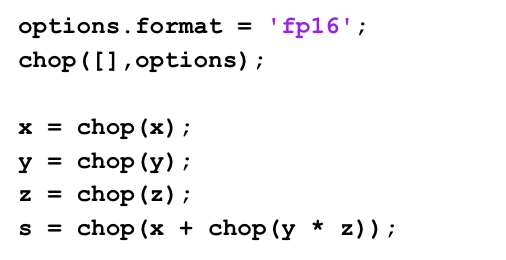
To simulate low precision arithmetic on our 64-bit computers, we have imported a MATLAB package called chop. The toolbox allows us to explore single precision, half precision, and other customized formats. Each input needs to be transformed, but the real work comes from chopping each operation. The code below is a toy example of how to calculate $x + y \times z$ in half precision with chop.
Blocking
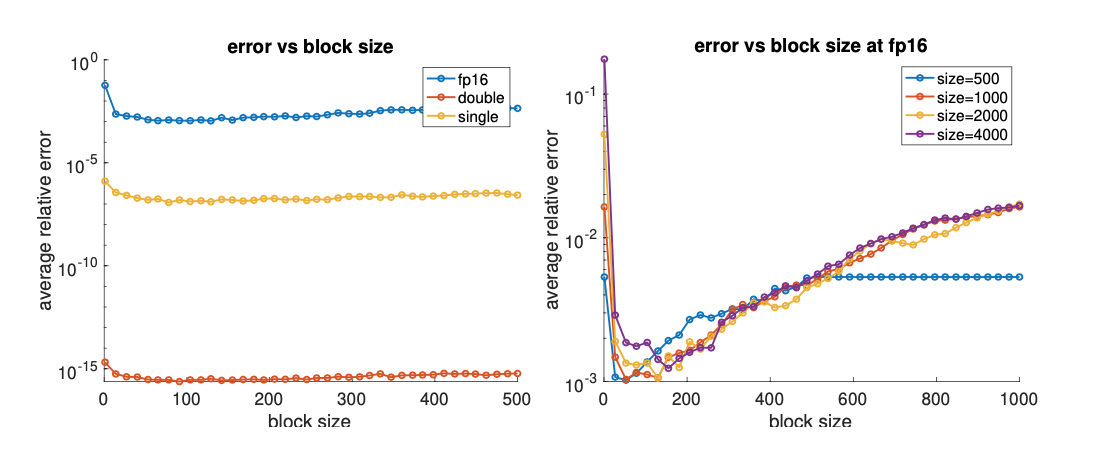
When the number is being chopped from double precision to half precision, a lot of bits are dropped (from 64 bits to 16 bits). This would certainly cause a level of inaccuracy, so in order to reduce the errors, a method called blocking is used. Blocking is the same as breaking a large operation into smaller chunks, where each is computed independently and the result is then summed.
We compute the inner product for each precision and block size for 20 times and calculate the average. The errors are calculated as the differences between the result of using the chopped version of inner product function and the built-in function in matlab.
Inverse Problems and Iterative Methods
Inverse problems are problems where our goal is to find the internal or hidden information (inputs) from outside measurements (results). The internal data can be approximated by iterative methods, a repeating implementation of the same system of equations, with variables getting updated each round, hoping the value generated can be closer to the true value we desire each term.
Conjugate Gradient Method
The Conjugate Gradient algorithm (CG) aims to solve the linear system Ax = b where A is SPD (symmetric and positive definite),transforming the problem of finding solution to an optimization problem where we want to minimize $\phi(x)=\frac{1}{2}x^{T}Ax-x^{T}b$. This can be easily seen from $\nabla \phi (x) = 0$ -> $Ax-b=0$.
In each step, the method provides us with a search direction and a step-length so that the error of this iteration is A-orthogonal to the search direction of the previous iteration. Eventually, it will converge to the minimal point. The CGLS algorithm is the least-squares version of the CG method, applied to the normal equation ATAx = ATb. However, CGLS requires computing inner products, which can overflow for large-scale problems in low precision.
Chebyshev Semi-Iterative Method
The Chebyshev Semi-Iterative (CS) Method requires no inner product computation, which is great because inner products can cause overflow easily in low precision. But there is always the trade-off! The CS method requires the user to have an idea of the range of the matrix A’s eigenvalues. The result given by CS is a linear combination of all solutions in each iteration, and the weights are obtained from the Chebyshev polynomial, which has the favorable property to ensure that the result obtained in each iteration of CS is smaller than an upper bound.
Experiment
IR Tools
We modify the CGLS method in the IRtool package in Matlab so that it can operate in lower precision, and we use two test problems in the same package to investigate how the method performs at lower precision, mainly half precision.
Image Deblurring Using CGLS
First, we use our modified version of CGLS without regularization to solve the image deblurring problem. In this application, we solve Ax = b, where b is an observed blurred image, A is a matrix that models the blurring operation, and x is the desired clean image. We didn’t add any noise to b in the problem of Ax = b at the beginning, and the graphs are demonstrated below.
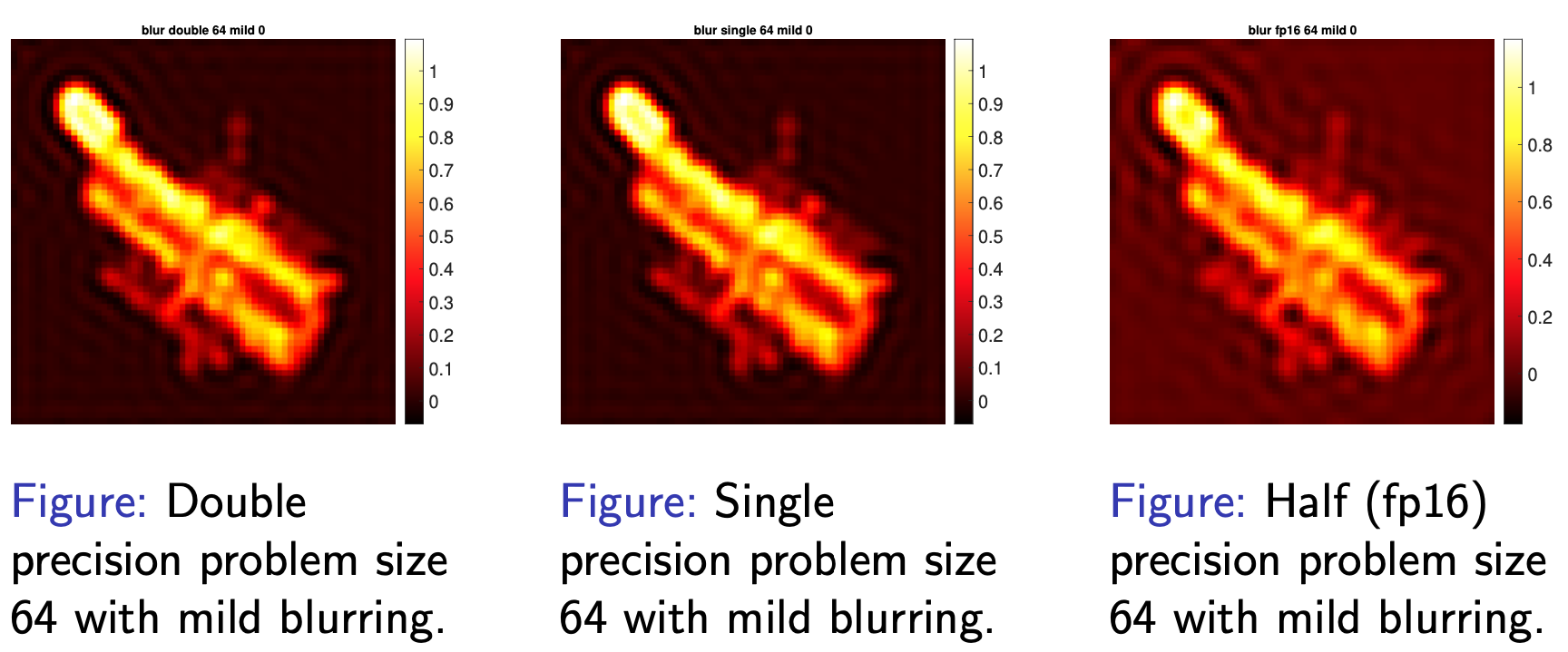
We use our modified version of CGLS for single and half precision, and the graph in single precision is similar to the graph in double precision. However, for half precision, the background is not the same as that in the double-precision or single-precision graph; it contains more artifacts.
We also plot the error norms of the solution at each iteration using different precision levels.
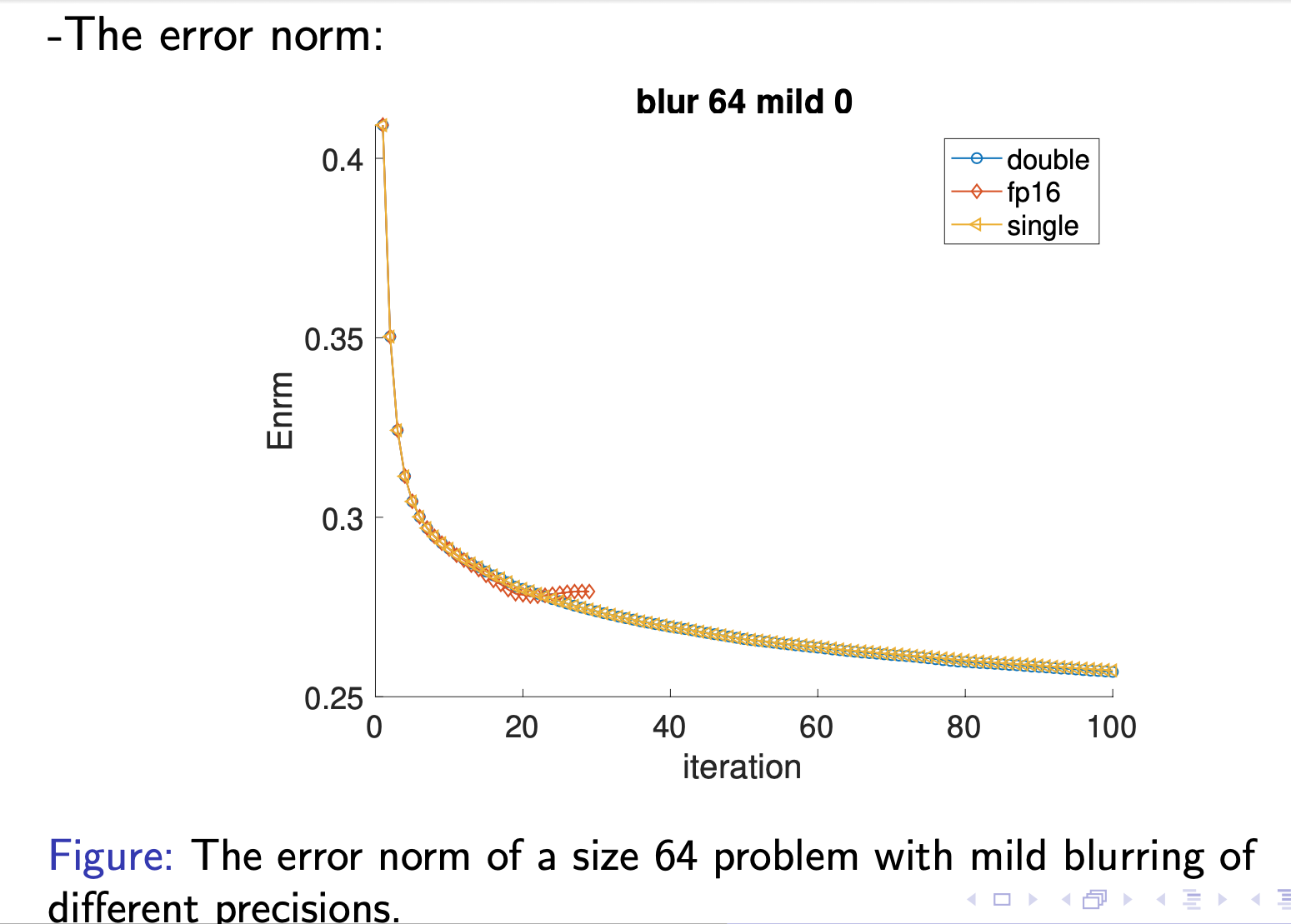
From the graph, all three error norms overlap from the beginning until around the 20th iteration, where the half-precision errors begin to deviate from those in single and double precision. The difference is due to the round-off errors of half precision, which add up and take over. Besides, the error norms for half precision terminates at the 28th iteration because overflow of inner products causes NaNs (Not a Number) to be computed during the iteration.
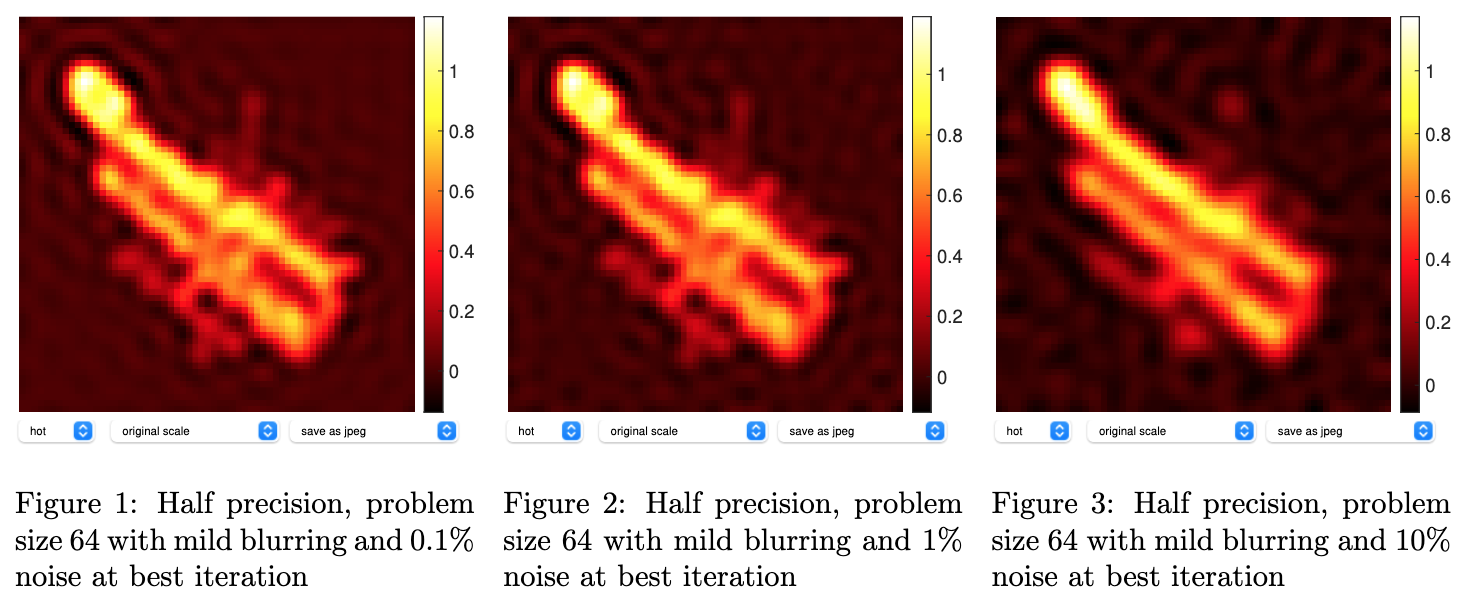
After investigating the idealized situations where there is no noise in the observed image, we then apply our code to problems that contains additive random noise to see how it is likely to perform in real life. That is, we try to compute x from the observed image b = Ax + noise.
For half precision, with 0.1% noise, the picture looks almost the same as the one that contains no noise. However, if the noise level is increased to 1%, the background has substantially more artifacts, while the middle object is still identifiable. Noise has taken over the black background but not the satellite yet. Eventually, the whole image is flushed with the noisy artifacts with 10% noise; the picture no longer contains any meaningful information. Notice that the results below are generated using x from the best iteration, that is the iteration with the smallest error norms, not from the last iteration.
Now we turn our attention to the error norm, the difference between the original image and the one our algorithm generates at each iteration. When 0.1% noise is added, as the number of iterations goes up, the error norm reduces significantly across all three formats. Intriguingly, for images with 1% or 10% noise, the best reconstruction is not the last iteration but somewhere along the middle (it’s around the 50th iteration for 1% and 10th for 10%). The reason behind the phenomenon is that while we are transforming the output image, b, the blended noise also gets inverted along each iteration. Eventually, the random data accumulate and dominate the solution at some point. We are showing the results where the error norm is the smallest to see what is the best possible solution we can compute. However, in reality the true x is not known, meaning we don’t know the error norms, so we can only show results from the last iteration, not from the best iteration.
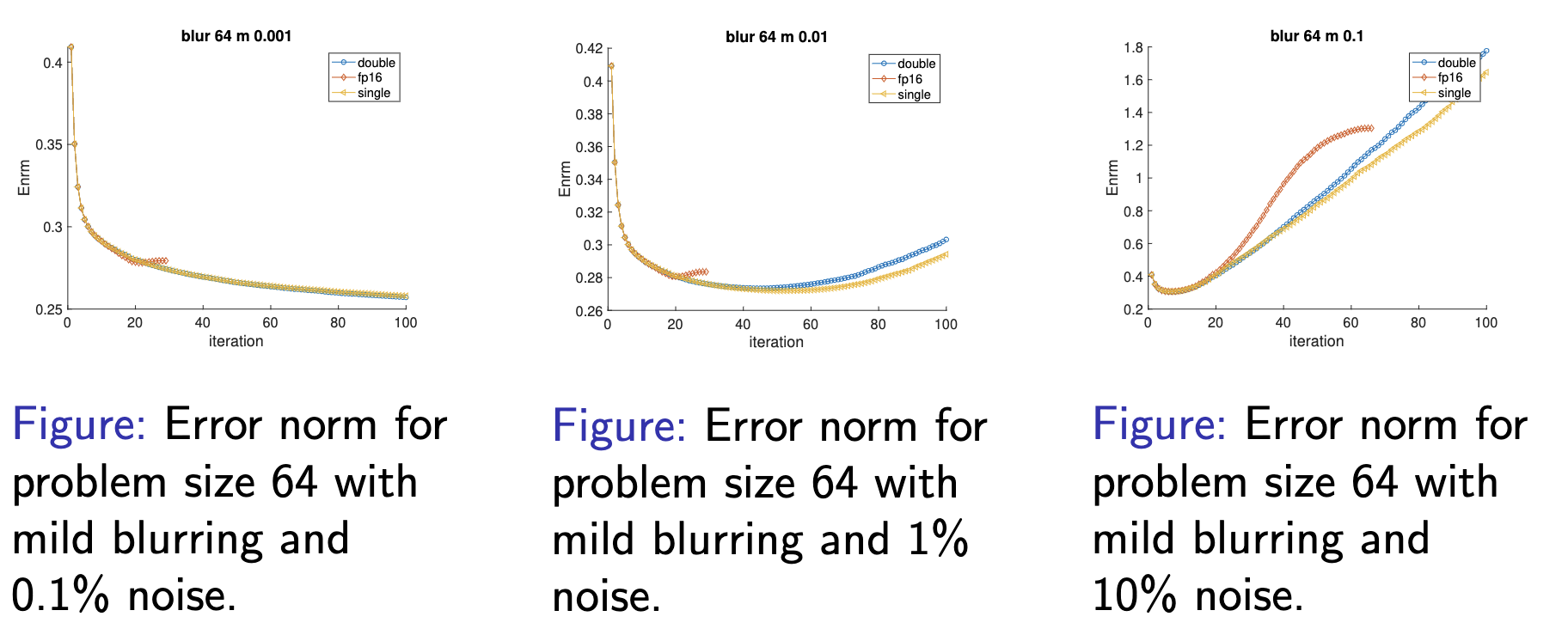
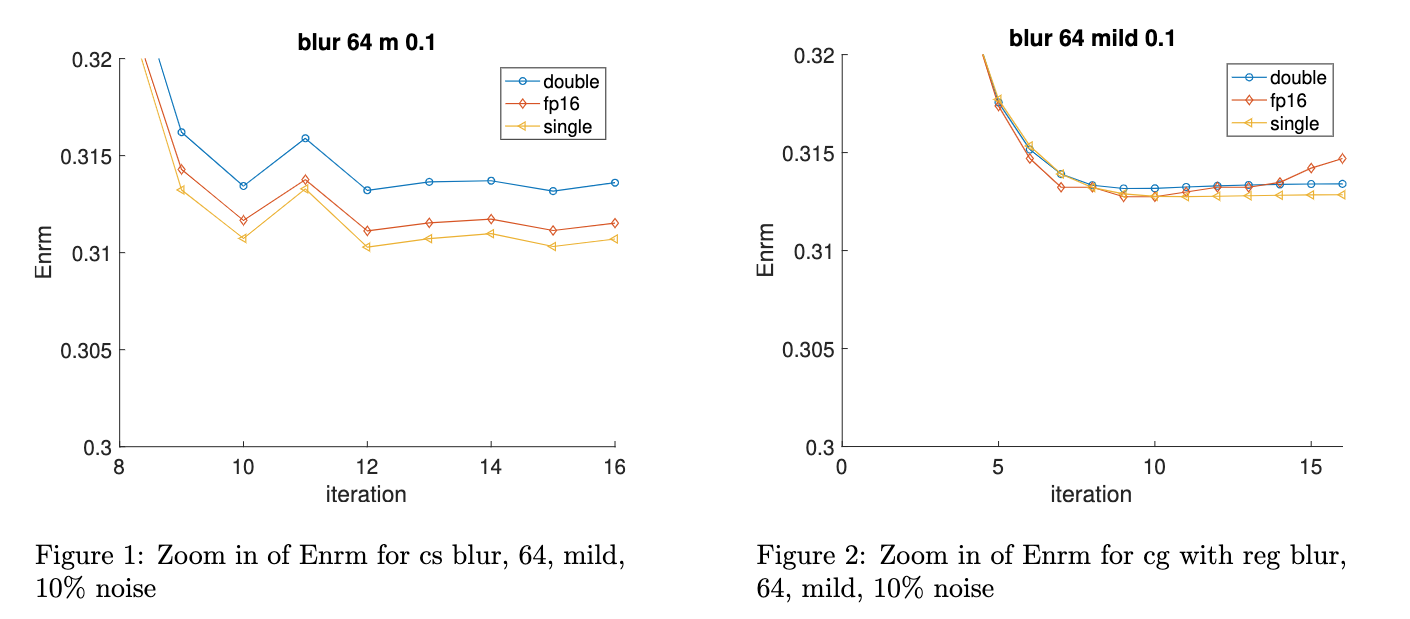
Image Deblurring Using CS
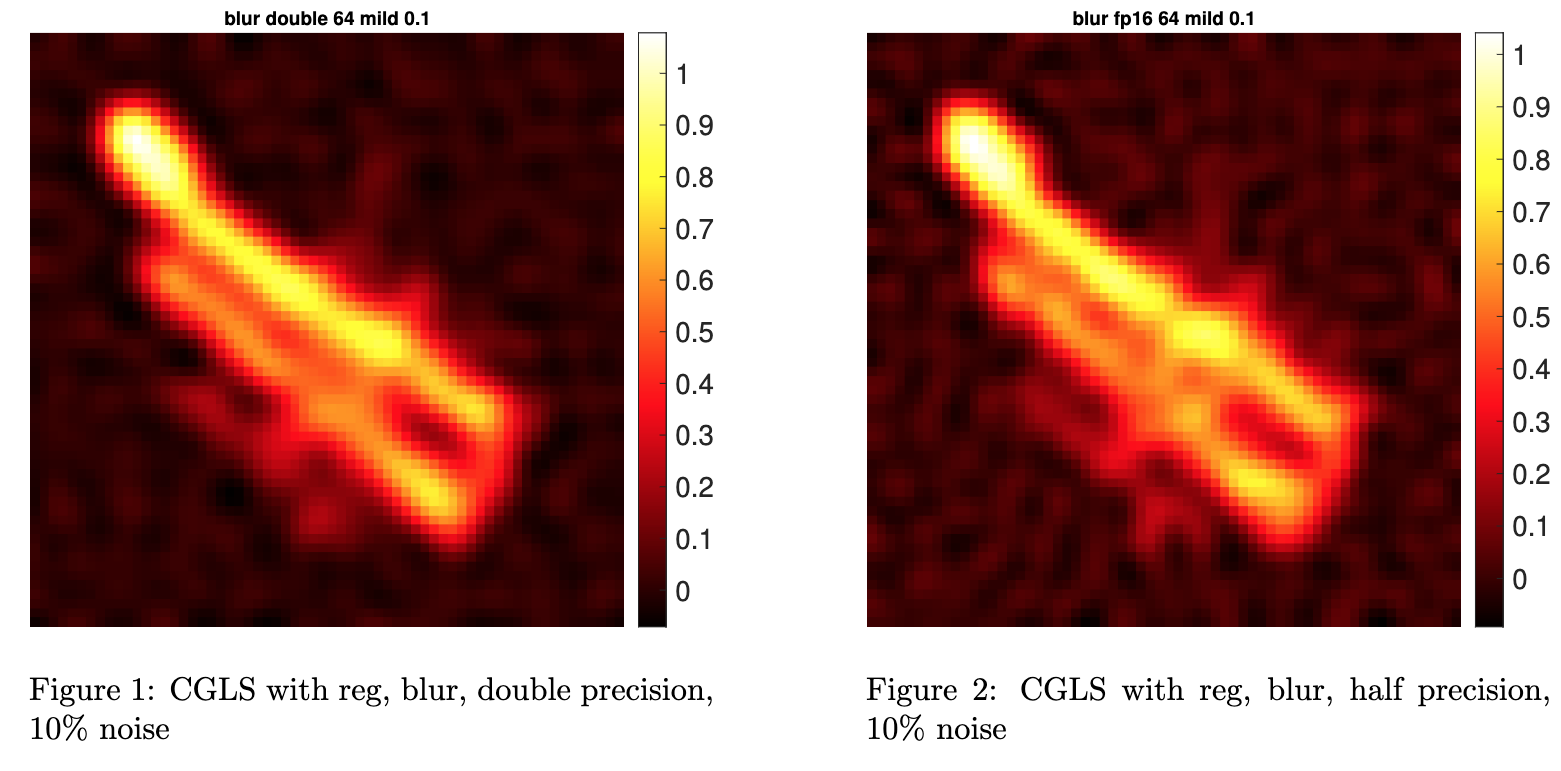
In order to prevent the occurrence of overflow, we experiment with the CS algorithm (where no inner products are needed) and use chop for lower precision. Tikhonov regularization is applied to CS after we find out that the algorithm performs poorly due to the close-to-zero singular values of A when it’s ill-conditioned. Now we are solving: $$\min_{x} {||Ax-b||_2^2+\lambda^2||x||_2^2}$$ where $\lambda$ is a parameter that needs to be chosen. Here we show experiments for the case with 10% noise, and we use $\lambda$ = 0.199.
From the graph below, it is clear that even with 10% noise, the half-precision image looks very similar to that in double precision, better than what we have using CGLS (results from the last iteration).
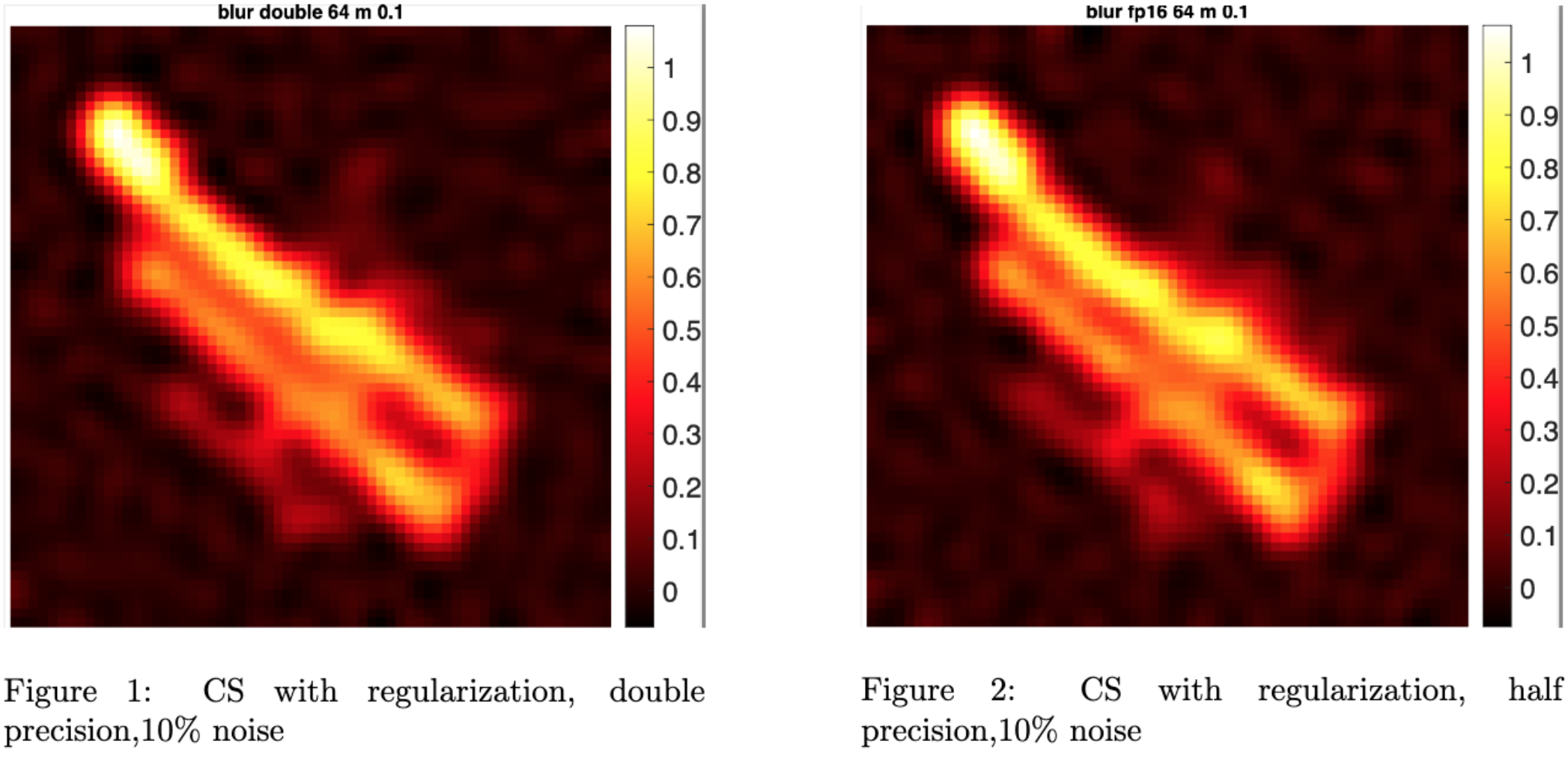
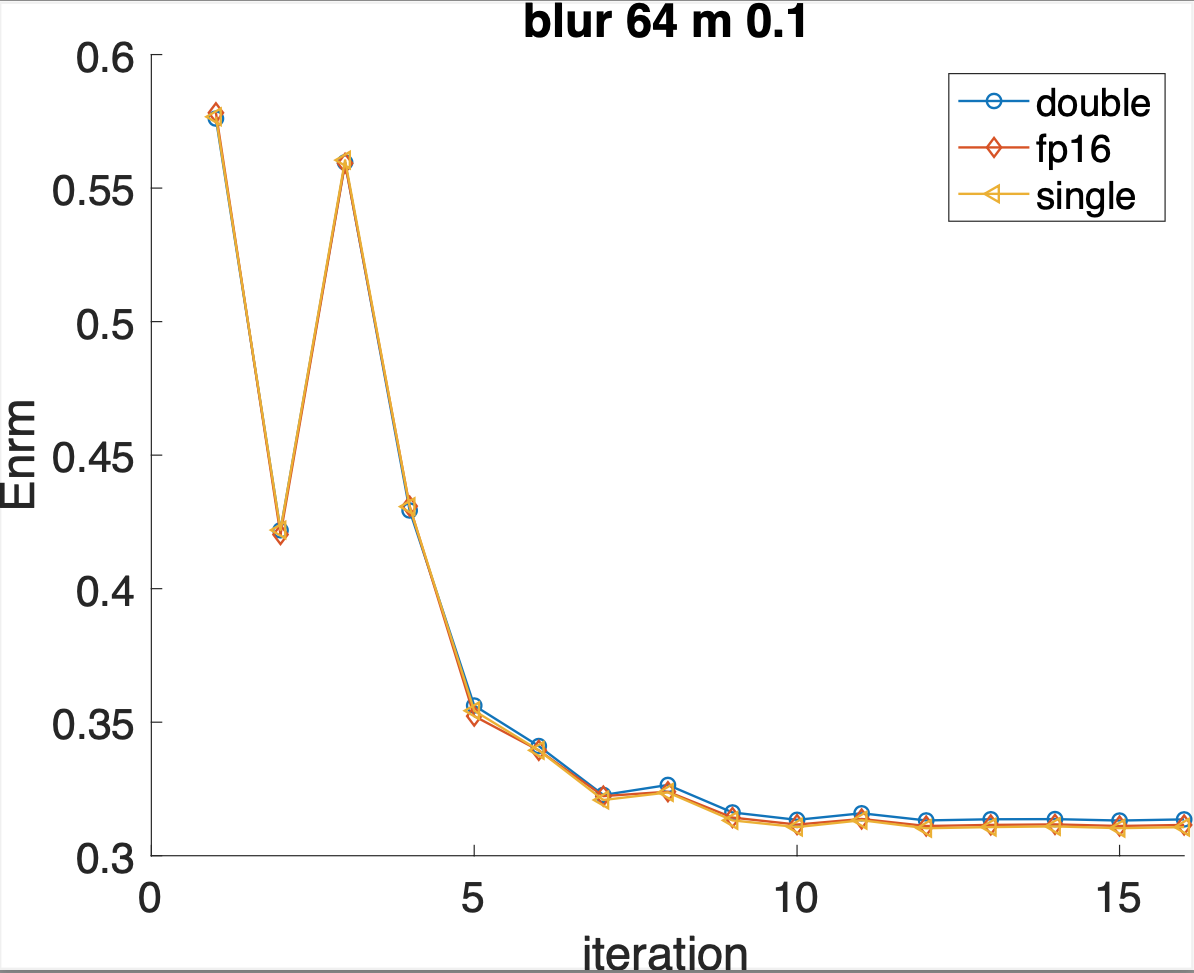
Image Deblurring Using CGLS with regularization
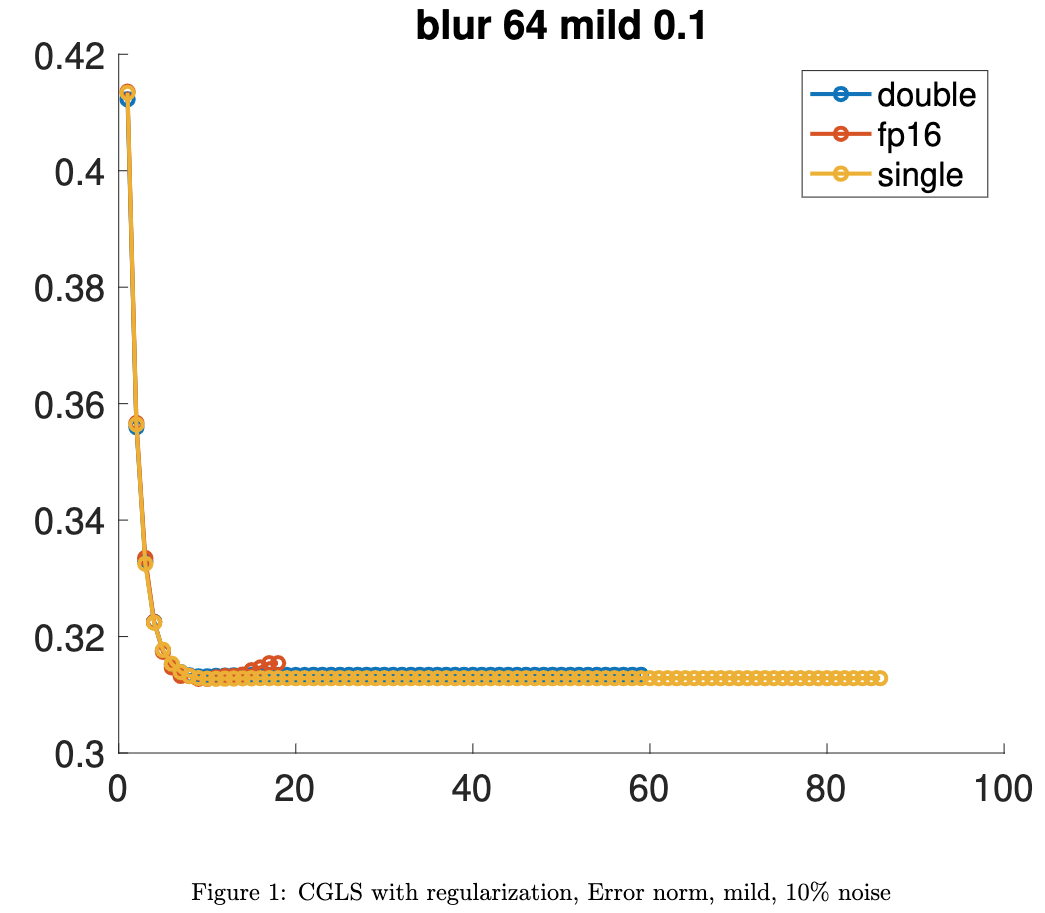
To fairly compare CGLS and CS, we add Tikhonov regularization to CGLS and run the test problem again. The diagrams are listed below.
More about us
Yizhou Chen

Xiaoyun Gong
Xiang Ji

James Nagy
Samuel Candler Dobbs Professor
My research interests include efficient training of deep neural networks and optimal representations of high-dimensional data.